Publications
Enhancing human learning via spaced repetition optimization
Behzad Tabibian Utkarsh Upadhyay Abir De Ali Zarezadeh Bernhard Schoelkopf Manuel Gomez-Rodriguez

Understanding human memory has been a long-standing problem in various scientific disciplines. Early works focused on characterizing human memory using small-scale controlled experiments and these empirical studies later motivated the design of spaced repetition algorithms for efficient memorization. However, current spaced repetition algorithms are rule-based heuristics with hard-coded parameters, which do not leverage the automated fine-grained monitoring and greater degree of control offered by modern online learning platforms. In this work, we develop a computational framework to derive optimal spaced repetition algorithms, specially designed to adapt to the learners’ performance. A large-scale natural experiment using data from a popular language-learning online platform provides empirical evidence that the spaced repetition algorithms derived using our framework are significantly superior to alternatives.
Leveraging the Crowd to Detect and Reduce the Spread of Fake News and Misinformation
Jooyeon Kim Behzad Tabibian Alice Oh Bernhard Schoelkopf Manuel Gomez-Rodriguez
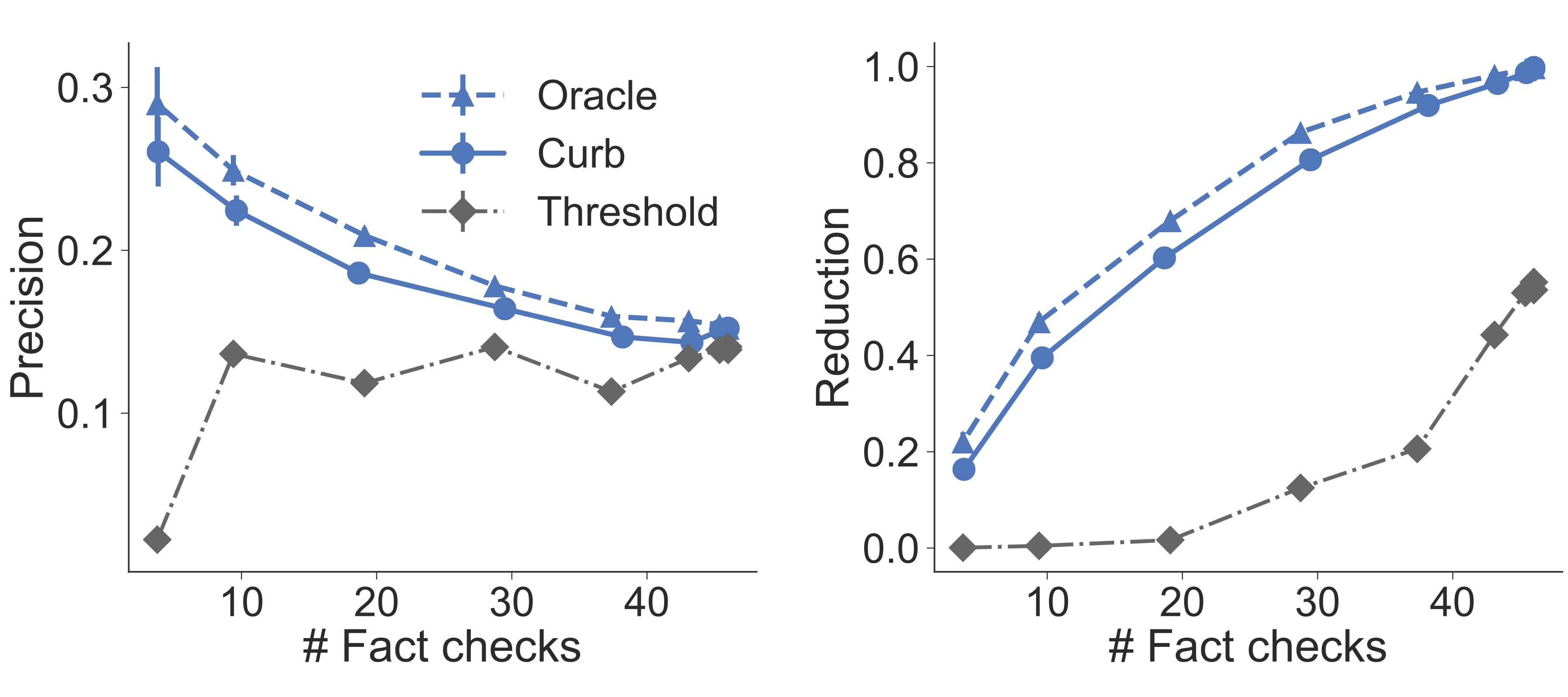
Online social networking sites are experimenting with the following crowd-powered procedure to reduce the spread of fake news andmisinformation: whenever a user is exposed to a story through her feed, she can flag the story as misinformation and, if the story receives enough flags, it is sent to a trusted third party for fact checking. If this party identifies the story as misinformation, it is marked as disputed. However, given the uncertain number of exposures, the high cost of fact checking, and the trade-off between flags and exposures, the above mentioned procedure requires careful reasoning and smart algorithms which, to the best of our knowledge, do not exist to date. In this paper, we first introduce a flexible representation of the above procedure using the framework of marked temporal point processes. Then, we develop a scalable online algorithm, Curb, to select which stories to send for fact checking and when to do so to efficiently reduce the spread of misinformation with provable guarantees. In doing so, we need to solve a novel stochastic optimal control problem for stochastic differential equations with jumps, which is of independent interest. Experiments on two real-world datasets gathered from Twitter and Weibo show that our algorithm may be able to effectively reduce the spread of misinformation.
Design and Analysis of the NIPS 2016 Review Process
Nihar B. Shah Behzad Tabibian Krikamol Muandet Isabelle Guyon Ulrike von Luxburg
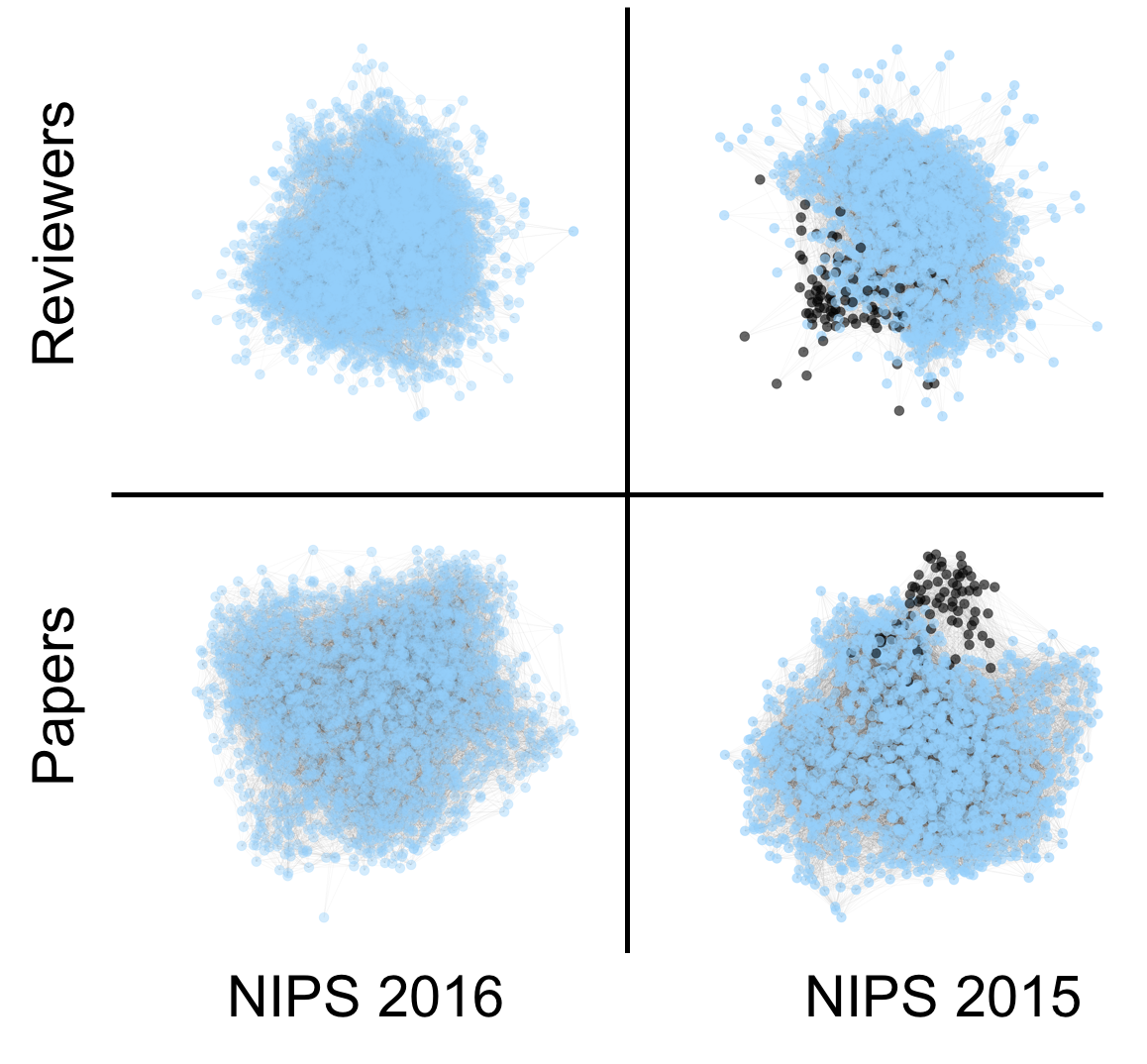
Neural Information Processing Systems (NIPS) is a top-tier annual conference in machine learning. The 2016 edition of the conference comprised more than 2,400 paper submissions, 3,000 reviewers, and 8,000 attendees, representing a growth of nearly 40% in terms of submissions, 96% in terms of reviewers, and over 100% in terms of attendees as compared to the previous year. In this report, we analyze several aspects of the data collected during the review process, including an experiment investigating the efficacy of collecting ordinal rankings from reviewers (vs. usual scores aka cardinal rankings). Our goal is to check the soundness of the review process we implemented and, in going so, provide insights that may be useful in the design of the review process of subsequent conferences. We introduce a number of metrics that could be used for monitoring improvements when new ideas are introduced.
Distilling Information Reliability and Source Trustworthiness from Digital Traces
Behzad Tabibian Isabel Valera Mehrdad Farajtabar Le Song Bernhard Schoelkopf Manuel Gomez-Rodriguez
Online knowledge repositories typically rely on their users or dedicated editors to evaluate the reliability of their contents. These explicit feedback mechanisms can be viewed as noisy measurements of both information reliability and information source trustworthiness. Can we leverage these noisy measurements, often biased, to distill a robust, unbiased and interpretable measure of both notions? In this paper, we argue that the large volume of digital traces left by the users within knowledge repositories also reflect information reliability and source trustworthiness. In particular, we propose a temporal point process modeling framework which links the temporal behavior of the users to information reliability and source trustworthiness. Furthermore, we develop an efficient convex optimization procedure to learn the parameters of the model from historical traces of the evaluations provided by these users. Experiments on real-world data gathered from Wikipedia and Stack Overflow show that our modeling framework accurately predicts evaluation events, provides an interpretable measure of information reliability and source trustworthiness, and yields interesting insights about real-world events.
Towards a Cognitively-Based Analytic Model of Human Control of Swarms
Behzad Tabibian Michael Lewis Christian Lebiere Nilanjan Chakraborty Katia Sycara Sefano Bennati Meeko Oishi

Robotic swarms are nonlinear dynamical systems that benefit from the presence of human operators in realistic missions with changing goals and constraints. There has been recent interest in safe operations of robotic swarms under human control. Verification and validation techniques for these human-machine systems could be deployed to provide formal guarantees of safe performance. A current limitation that hinders practical significant applications of verification to human-machine systems is the lack of analytic models of the human operator that include realistic cognitive constraints. Our research aims to develop high fidelity analytic human models via abstraction of cognitive models based on ACTR. In this paper, we report on results from the first step in this process. We designed a 2-choice control task of a robotic swarm, obtained data from human operators and compared the fit of these data to two analytic models and an ACT-R based cognitive model. We present the experimental results and discuss our future plans on how the analytic model will be derived from the cognitive model so that the whole humanswarm system could be amenable to verification techniques.
Design and Implementation of an Inverse Dynamics Controller for Uncertain Nonholonomic Robotic Systems
Khoshnam Shojaei Alireza Mohammad Shahri Behzad Tabibian
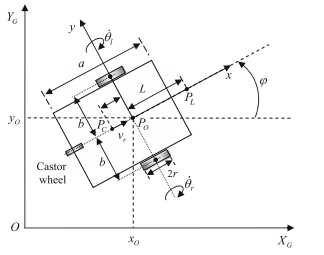
This paper addresses the trajectory tracking control problem of nonholonomic robotic systems in the presence of modeling uncertainties. A tracking controller is proposed such that it combines the inverse dynamics control technique and an adaptive robust PID control strategy to preserve robustness to both parametric and nonparametric uncertainties. A SPR-Lypunov stability analysis demonstrates that tracking errors are uniformly ultimately bounded (UUB) and exponentially converge to a small ball containing the origin. The proposed inverse dynamics tracking controller is successfully applied to a nonholonomic wheeled mobile robot (WMR) and experimental results are presented to validate the effectiveness of the proposed controller.
Team Edinferno, Description Paper for RoboCup 2011 SPL
Subramanian Ramamoorthy Aris Valtazanos Efsthathios Vafeias Chris Towell Majd Hawasly Ioannis Havoutis Thomas McGuire Behzad Tabibian Sethu Vijayakumar Taku Komura

This paper summarizes progress made by our robotic soccer team, Team Edinferno, towards our participation in the 2013 RoboCup Standard Platform League competition held in Eindhoven, The Netherlands. Our team made its RoboCup debut in the 2011 world cup held in Istanbul, Turkey, where we entered both in the Standard Platform League and the 2D Simulation League. In our debut at the SPL, where we entered a mostly homegrown team, we were eliminated after the first round. We returned to the 2012 Mexico City RoboCup competition, where our team reached the quarterfinals, losing to the defending champions and eventual finalists, B-Human. This version of our code leveraged the publicly available B-Human framework to provide us a software base and modules for walking and low-level vision. We implemented and improved on all other modules including robot behaviour, optimised kicks and goalkeeper behaviour, team level coordination/communication and probabilistic localisation. For the 2013 competition, we will retain the same base software framework, allowing us to implement our recent advances in vision, self-localisation, and behaviour algorithms. As a team, our primary research interests are centered on issues of robot learning, especially for effective autonomous decision making and strategic behaviour in continually changing worlds.
Adaptive trajectory tracking control of a differential drive wheeled mobile robot
Khoshnam Shojaei Alireza Mohammad Shahri Ahmadreza Tarakameh Behzad Tabibian
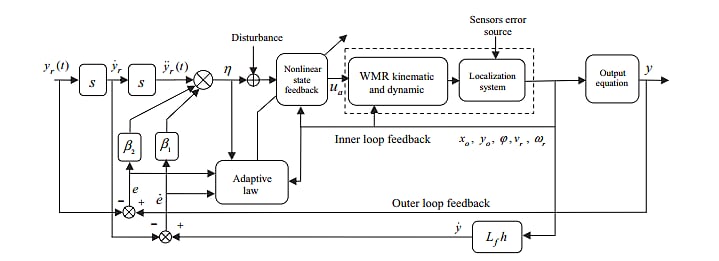
This paper presents an adaptive trajectory tracking controller for a non-holonomic wheeled mobile robot (WMR) in the presence of parametric uncertainty in the kinematic and dynamic models of the WMR and actuator dynamics. The adaptive non-linear control law is designed based on input–output feedback linearization technique to get asymptotically exact cancellation for the uncertainty in the given system parameters. In order to evaluate the performance of the proposed controller, a non-adaptive controller is compared with the adaptive controller via computer simulation results. The results show satisfactory trajectory tracking performance by virtue of SPR-Lyapunov design approach. In order to verify the simulation results, a set of experiments have been carried out on a commercial mobile robot. The experimental results also show the effectiveness of the proposed controller.